The summertime was not the best time to work on my inMoov robot, because of outdoor activities. But now it is getting cold and the Dutch weather is keeping me inside. It is time to moving forward again.
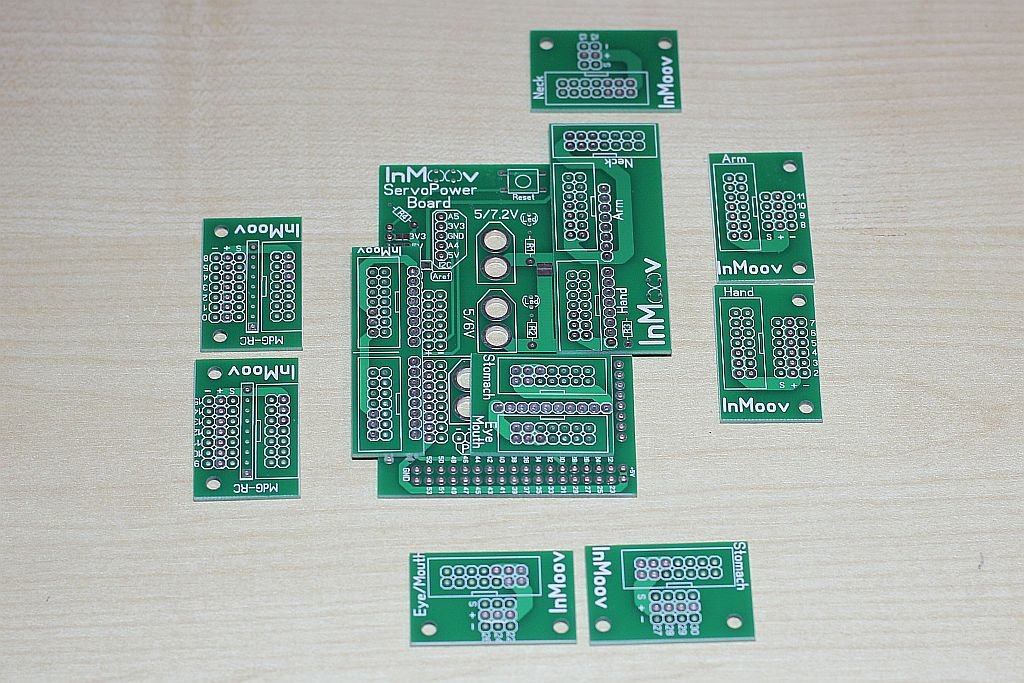
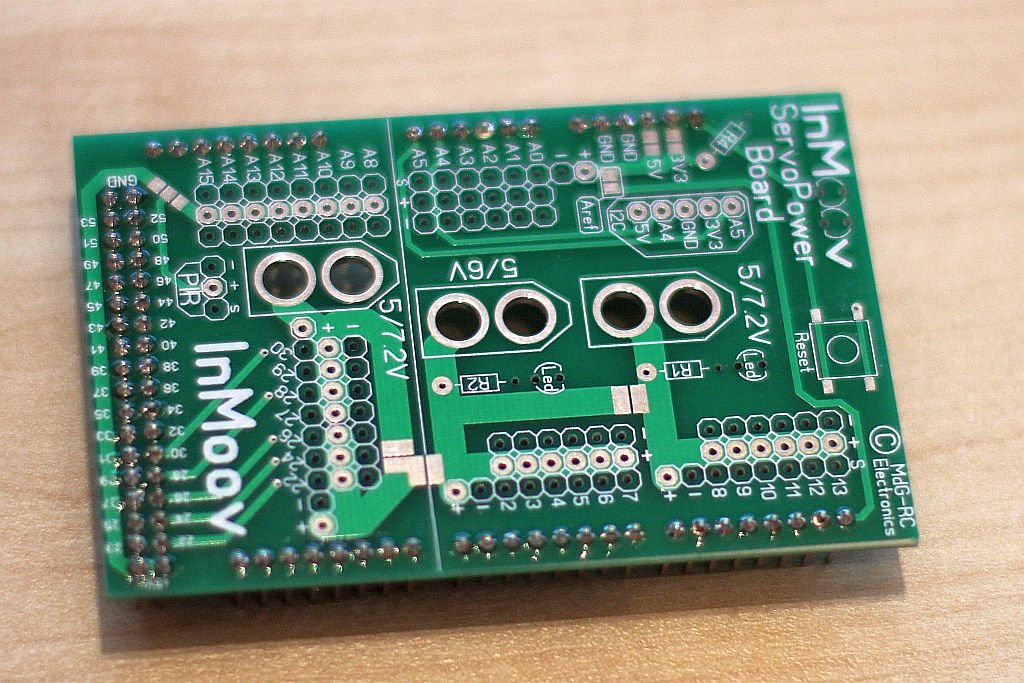
I ordered the Nervo Boards from the www.inMoov.fr website. I first ordered one set, because I wanted to see what the quality was. This was what I received.

I was happy with the quality so I ordered the second set also. First I had to figure out how the all boards supposed to fit together. For now I don’t want to use the finger sensors, but they are on the left side on the picture below.
At first I took an Arduino Mega compatible board (Funduino) and inserted the pins needed for the Nervo Board. This is done to be sure that the pins are straight and on the right position. Beware: not all the pins on the Arduino Mega board are used, so leave those position empty.
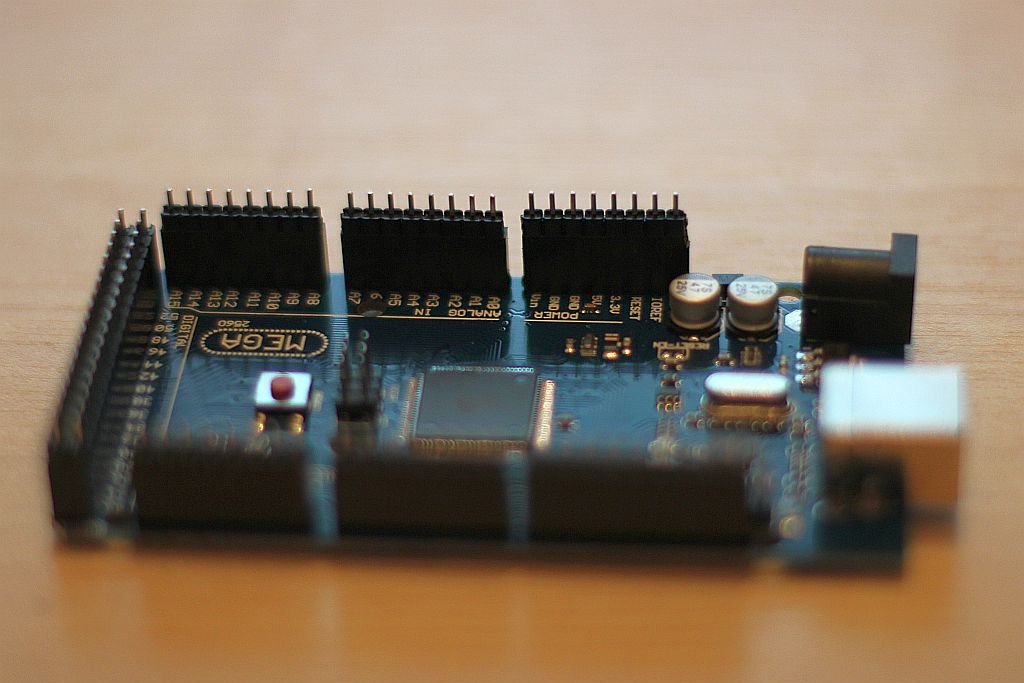
Next I fitted the main Nervo Board over the pins on the Arduino Mega. The pins 8 till 13 didn’t fit perfectly. I don’t know of this was caused by the Nervo board or the Funduino. I had to lift one side up to bring the pin closer to the hole.

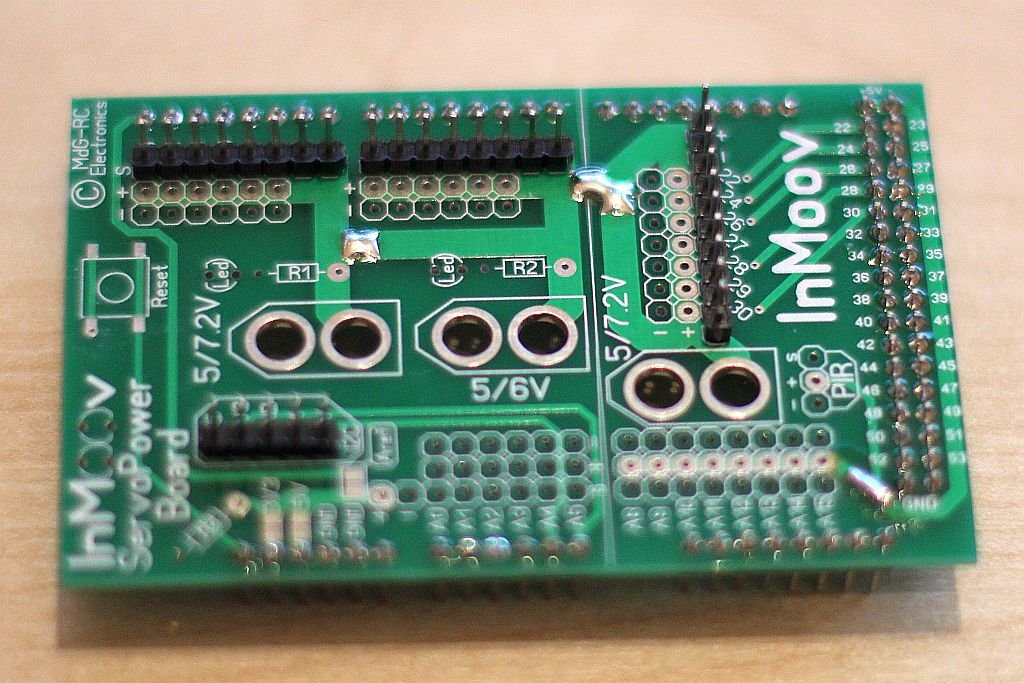
I soldered all together.

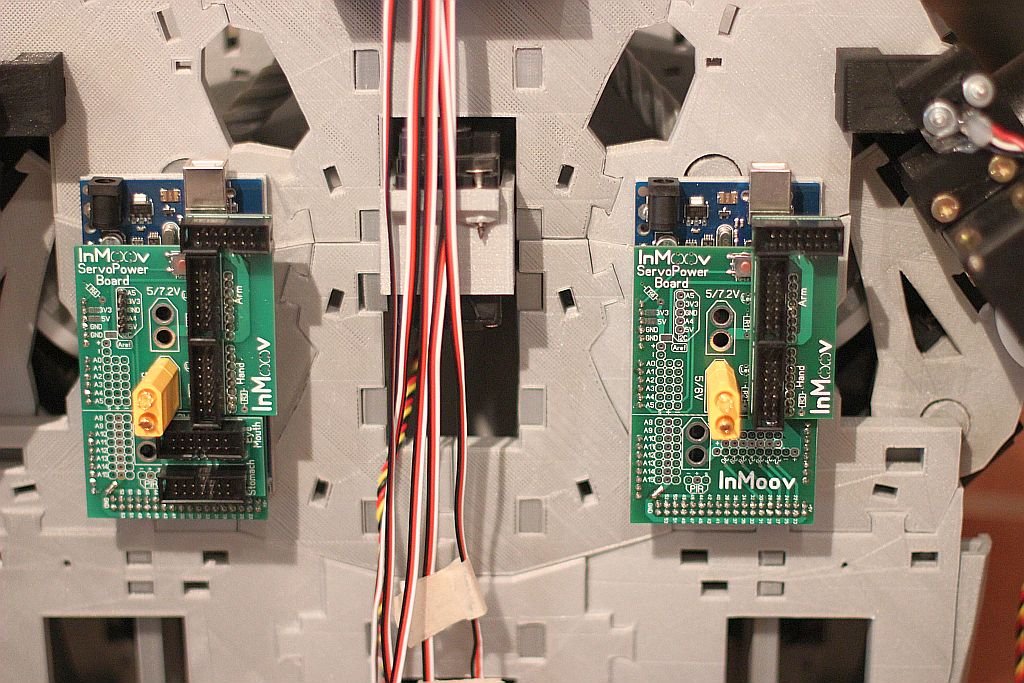
My inMoov will use the same Voltage for all the servos, so I soldered the 3 connections on the top side of the board. The solder did stick very well on the pads at bottom right on the picture. A little piece of wire was needed to make a solid connection.

I removed the head and neck pins from the main board, because I was afraid to burn the headers on the top board. I was easier to solder the pins on the top breakout board first and then solder the 12 pin connectors. Now it was easy to solder the breakout board on the Nervo main board.
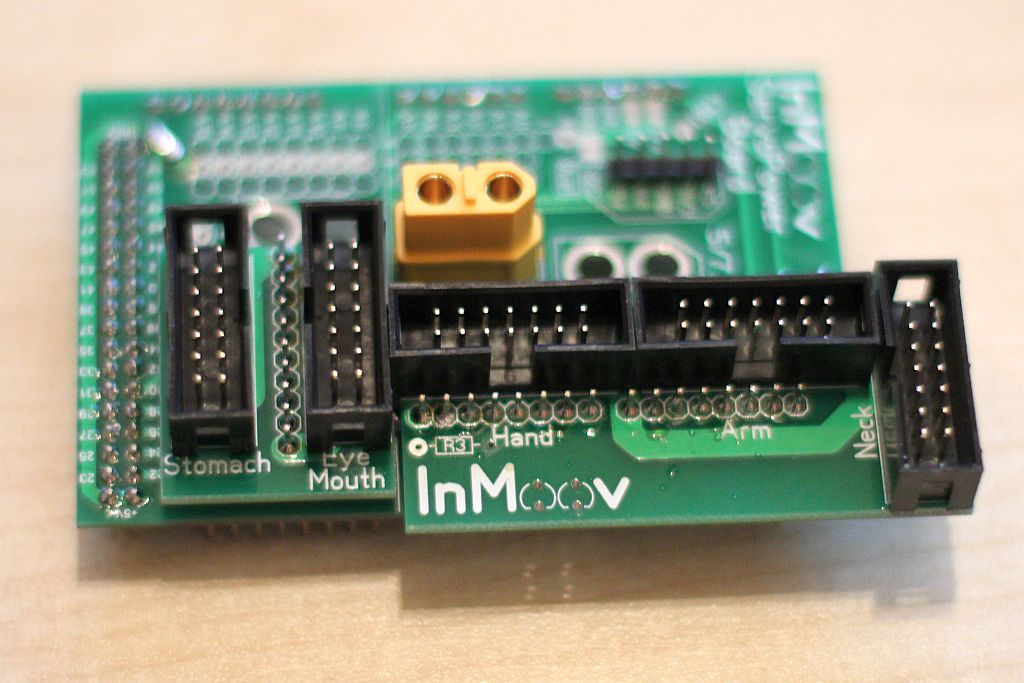
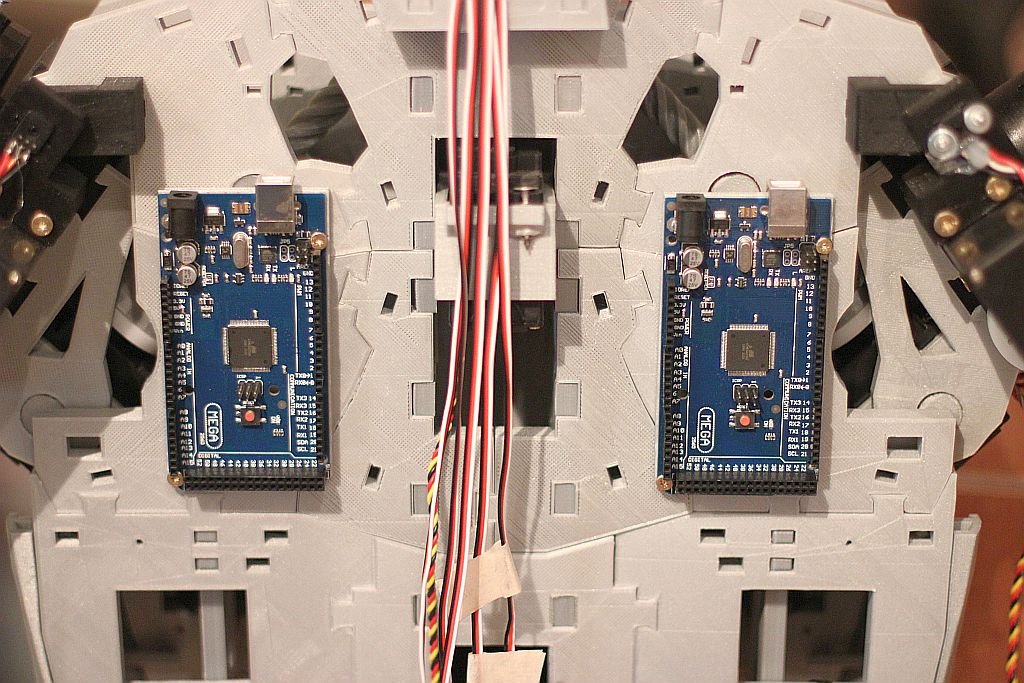
After an evening of soldering the result is very nice. The right board doesn’t have the neck and Stomach breakout board on it. You can use an Arduino Uno instead of an Arduino Mega. You never can have enough io. 😉

To mount the Nervo Board assemblies on my inMoov robot I printed a Mount from Thingiverse. [http://www.thingiverse.com/thing:30270]. It didn’t fit. I remove the rim around the board because I didn’t want to print another one.

I used two 3 x 16 mm screws to mount the assemblies on the back of the inMoov. There is not a dedicated spot for it, so I looked at a spot where the two screws would fit.